Первый вопрос, который, я уверен, возникнет у читателей «Почему использован такой маленький дисплей?» Поэтому я сразу на него отвечу: этот «мини-эхолотик» разрабатывался по просьбе знакомого из того, что оказалось под рукой. А этими подручными средствами оказались ATMega8L, дисплей от nokia3310 и излучатель от промышленного ультразвукового датчика. Еще Вы, наверное, спросите возможно ли переделать программу/схему под другой, больший дисплей? Да. Теоретически это возможно.
Конструкция собрана в корпусе «Z14» (http://www.kradex.com.pl/sklep/328-z14.html). Питание обеспечивается от аккумулятора 9В (например GP17R9H или подобный). Максимальный потребляемый ток не более 30 мА (в авторском варианте 23мА).
Теперь о возможностях эхолота. Рабочая частота 200 кГц и может быть изменена под конкретный имеющийся излучатель. Программно реализована возможность измерять глубину до 16 метров. Но скажу сразу: максимальная глубина, которую сможет «видеть» эхолот, в большой степени будет зависеть от параметров примененного излучателя. Моя конструкция на данное время тестировалась только на водоеме с максимальной глубиной около 9м. Прибор показал отличные результаты.
Итак, перейдем к схеме. Схема мини-эхолота показана на рисунке ниже.
Схему с большим разрешением смотрите здесь: mini-sonar-1_circuit.jpg
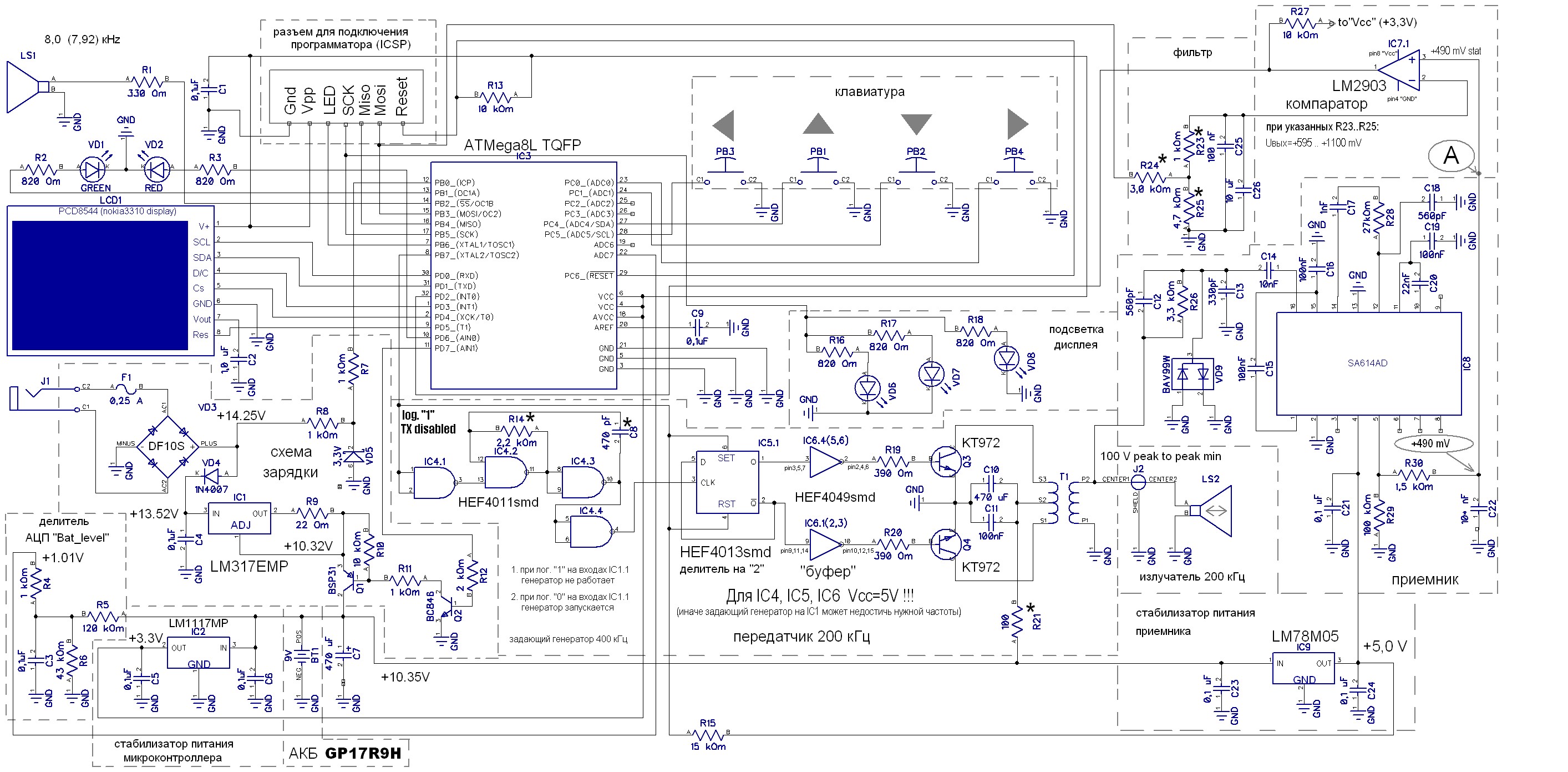{kind=link}
Основные функциональные блоки эхолота: схема управления (то есть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4, нагрузкой которых является трансформатор Т1. Сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с выхода приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16*8*6 из феррита M1000НМ. Первична обмотка наматывается в 2 провода и содержит 2х14 витков, вторичная – 150 витков провода ПЭВ-2 0,21мм. Первой мотается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть: датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был готовый излучатель. Как быть Вам?
Вариант 1: приобрести готовый датчик.
Вариант 2: изготовить самому из пьезокерамики ЦТС-19 по технологии, описанной в [1-3] см. раздел «ссылки».
НАСТРОЙКА
На место R143 впаиваем резистор 1,8 кОм, на место R141 – подстроечный резистор Rп сопротивлением 0,5..1кОм.
Подключаем питание (полностью заряженный аккумулятор или «крону»). Измеряем потребляемый ток: если он выше 30 мА – ищите ошибки в схеме. В моем экземпляре потребляемый ток в режиме «PAUSE» составлял 19 мА. Далее смотрим на дисплей: если Вы видите то, что показано на рисунке ниже – это значит, что собранная схема на 90% рабочая.
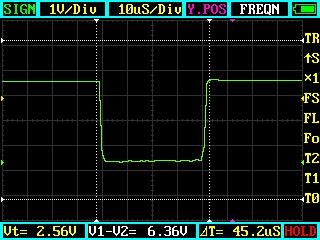
Теперь приступим к настройке остальных 10%. Отсоединяем батарею питания. Отключаем питание выходного каскада передатчика (выпаять R21). Отсоединяем выводы 1,2 микросхемы IC4 от вывода 8 (Port B7) микроконтроллера (выпаяв перемычку-переход возле ножки контроллера) и подключаем их на общий провод. Подключаем к выводу 4 IC4 частотомер и подаем на схему питание. Вращением ручки подстроечного резистора Rп устанавливаем частоту генератора равной двойной резонансной частоте вашего излучателя. То есть, если резонансная частота излучателя равна 200 кГц – то устанавливаем частоту генератора равной 400 кГц. Отсоединяем батарею питания. Отсоединяем выводы 1,2 IC4 от общего провода и впаиваем перемычку обратно. Подаем на схему питание и нажимаем кнопку «START». Подключаем осциллограф к выводу 8 микроконтроллера и убеждаемся в наличии управляющего отрицательного импульса длительностью примерно 45 мкС (смотрите осциллограмму ниже).
Подключаем осциллограф параллельно излучателю-датчику и убеждаемся в наличии зондирующих импульсов амплитудой не менее 75В. Если амплитуда меньше – значит проблема скорее всего в неправильной работе трансформатора (к.з., не «тот» сердечник, не подобрано нужное количество витков).
Далее в режиме «PAUSE» проверяем режим работы по постоянному току приемника сигналов на IC8 и компаратора на IC7 согласно карты напряжений. Напряжение на выводе 2 микросхемы IC4 должно быть больше напряжения на выводе 3 микросхемы IC4 на 30..80мВ, а если быть точнее – то на минимально необходимое для того, чтобы на выходе компаратора еще был лог. «0». В случае необходимости выставляем напряжение подбором номиналов R23..R25.
Нажимаем кнопку «START» и опускаем излучатель в сосуд с водой глубиной не менее 65см. Далее подключаем осциллограф к выводу 3 микросхемы IC7 и наблюдаем формируемые зондирующие импульсы и отраженный сигнал (смотрите осциллограмму ниже).
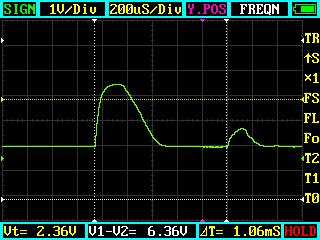
Ручкой подстроечного резистора Rп подстраиваем частоту задающего генератора передатчика по максимальной амплитуде отраженного сигнала (второй импульс на осциллограмме выше).
Отсоединяем подстроечный резистор Rп и измеряем его сопротивление. Подбираем такого же номинала резистор и впаиваем его на место R141.
Схема зарядки при правильном монтаже работает сразу и в наладке не нуждается.
На этом вся настройка мини-эхолота заканчивается.
Скачать файлы проекта можно здесь: mini-sonar-1.zip